







El Rector de la Universidad de Jaén (UJA), Juan Gómez Ortega, inauguró hoy la Jornada informativa para directivos y orientadores de centros de Educación Secundaria de la provincia, en la que se han resuelto dudas sobre la próxima prueba de acceso a la Universidad.
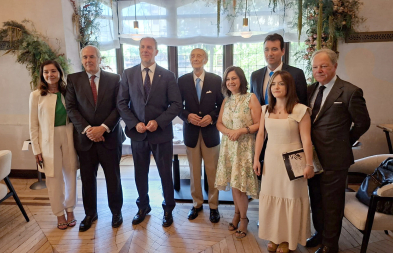
El Rector estuvo acompañado por la Delegada Territorial de Educación en Jaén, Yolanda Caballero Aceituno; la Vicerrectora de Estudiantes de la UJA, María Luisa del Moral Leal; el Director de Secretariado de Acceso de la UJA, Antonio Damas Serrano, y el jefe de servicio de Alumnado de la Dirección General de Universidades de la Consejería de Economía y Conocimiento y secretario de la Comisión del Distrito Único Universitario de Andalucía, Alfonso Bengoa Díaz.
El Rector de la UJA señaló que el “claro objetivo” de esta jornada era el de “informarles de las novedades y modificaciones del acceso a la Universidad”, especialmente en este año, debido a que “se está produciendo cambios en la normativa y esto ha hecho que haya una gran incertidumbre en los centros, por parte de estudiantes y de profesores”.
La entrada en vigor de la Lomce (Ley Orgánica para la mejora de la calidad educativa) hizo que el procedimiento de acceso a la Universidad cambiara. En principio, se planteó una prueba de evaluación final para obtener el título de Graduado en ESO y el título de Bachillerato. A la vez, se barajó la posibilidad de que cada Universidad desarrollara una prueba de acceso. Tras numerosas polémicas y la nueva situación política del país con el nuevo Gobierno, a finales de 2016 se aprobó una normativa por la que el procedimiento actual de acceso a la Universidad “es similar a la que teníamos antes, desde el punto de vista práctico”, dijo el Rector, aunque conlleva la introducción de nuevas materias.
 copia.jpg "Momento de la inauguracion de la jornada")
Por su parte, Yolanda Caballero manifestó que durante los últimos meses ha existido “mucha inquietud", y que los directivos y orientadores de los centros “han sido auténticos factores estabilizadores que, en la medida de sus posibilidades, han ido informando a toda la comunidad educativa de lo que iba a acontecer con esta prueba”. “Desde la Junta de Andalucía siempre hemos mantenido que era un cambio sin sentido hacer una evaluación para obtener el título de Bachillerato. Creemos firmemente que la evaluación debe estar inserta en el proceso de aprendizaje a lo largo de todo el año, a la vez que nuestro sistema de acceso a la Universidad tenía garantías de transparencia y de objetividad, y que funcionaba muy bien en nuestra Comunidad”, subrayó.
La jornada contó con la charla de Alfonso Bengoa Díaz, titulada “Todo lo que quería saber sobre cómo se accedería a la Universidad en el 2017 y nadie de lo podía contar”.
Autor: Gabinete de Comunicación y Proyección Institucional de la UJA (C.Q.R.)






.jpg "Captura de visión HoloLens y comparativa con la imagen real.")



.jpg "Juan Gómez charla con Chris Nugent y Luis Martínez.")
